#include <BoltIoT-Arduino-Helper.h>
# define left_motor1 6
# define left_motor2 7
# define right_motor1 8
# define right_motor2 9
# define sensor 3
String command = "";
int delay_time = 250;
String check() {
int sensor_value = digitalRead(sensor);
Serial.println(sensor_value);
Serial.println(command);
if ((sensor_value == 0) && (command == "FORWARD")) {
digitalWrite(left_motor2,LOW);
digitalWrite(left_motor1,LOW);
digitalWrite(right_motor1,LOW);
digitalWrite(right_motor2,LOW);
command = "";
}
return "STOP";
}
String forward(String *data) {
command = "FORWARD";
digitalWrite(left_motor1,HIGH);
digitalWrite(left_motor2,LOW);
digitalWrite(right_motor1,LOW);
digitalWrite(right_motor2,HIGH);
return "Success:Forward";
}
String backward(String *data) {
command = "BACKWARD";
digitalWrite(left_motor1,LOW);
digitalWrite(left_motor2,HIGH);
digitalWrite(right_motor1,HIGH);
digitalWrite(right_motor2,LOW);
return "Success:Backward";
}
String right(String *data) {
command = "RIGHT";
digitalWrite(left_motor1,LOW);
digitalWrite(left_motor2,HIGH);
digitalWrite(right_motor1,LOW);
digitalWrite(right_motor2,HIGH);
delay(delay_time);
digitalWrite(left_motor2,LOW);
digitalWrite(left_motor1,LOW);
digitalWrite(right_motor1,LOW);
digitalWrite(right_motor2,LOW);
return "Success:Left";
}
String left(String *data) {
command = "LEFT";
digitalWrite(left_motor1,HIGH);
digitalWrite(left_motor2,LOW);
digitalWrite(right_motor1,HIGH);
digitalWrite(right_motor2,LOW);
delay(delay_time);
digitalWrite(left_motor2,LOW);
digitalWrite(left_motor1,LOW);
digitalWrite(right_motor1,LOW);
digitalWrite(right_motor2,LOW);
return "Success:Right";
}
String stopcar(String *data) {
digitalWrite(left_motor2,LOW);
digitalWrite(left_motor1,LOW);
digitalWrite(right_motor1,LOW);
digitalWrite(right_motor2,LOW);
return "Success:Stop";
}
void setup() {
// put your setup code here, to run once:
pinMode(left_motor1,OUTPUT);
pinMode(left_motor2,OUTPUT);
pinMode(right_motor1,OUTPUT);
pinMode(right_motor2,OUTPUT);
pinMode(sensor,INPUT);
boltiot.begin(Serial);
Serial.begin(9600);
boltiot.setCommandString("FORWARD",forward);
boltiot.setCommandString("BACKWARD",backward);
boltiot.setCommandString("LEFT",left);
boltiot.setCommandString("RIGHT",right);
boltiot.setCommandString("STOP",stopcar);
}
void loop() {
// put your main code here, to run repeatedly:
boltiot.handleCommand();
check();
}
WHEN I AM UPLOADING THE CODE TO ARUDINO A ERROR MESSAGE APPEARED HOW TO RESOLVE THIS
exit status 1
redefinition of 'void setup'
@mani2474695 Can you please share the screenshot of the error? Also, is this the complete code that you have entered in the Arduino IDE?
CODE:
#include <BoltIoT-Arduino-Helper.h>
# define left_motor1 6
# define left_motor2 7
# define right_motor1 8
# define right_motor2 9
# define sensor 3
String command = "";
int delay_time = 250;
String check() {
int sensor_value = digitalRead(sensor);
Serial.println(sensor_value);
Serial.println(command);
if ((sensor_value == 0) && (command == "FORWARD")) {
digitalWrite(left_motor2,LOW);
digitalWrite(left_motor1,LOW);
digitalWrite(right_motor1,LOW);
digitalWrite(right_motor2,LOW);
command = "";
}
return "STOP";
}
String forward(String *data) {
command = "FORWARD";
digitalWrite(left_motor1,HIGH);
digitalWrite(left_motor2,LOW);
digitalWrite(right_motor1,LOW);
digitalWrite(right_motor2,HIGH);
return "Success:Forward";
}
String backward(String *data) {
command = "BACKWARD";
digitalWrite(left_motor1,LOW);
digitalWrite(left_motor2,HIGH);
digitalWrite(right_motor1,HIGH);
digitalWrite(right_motor2,LOW);
return "Success:Backward";
}
String right(String *data) {
command = "RIGHT";
digitalWrite(left_motor1,LOW);
digitalWrite(left_motor2,HIGH);
digitalWrite(right_motor1,LOW);
digitalWrite(right_motor2,HIGH);
delay(delay_time);
digitalWrite(left_motor2,LOW);
digitalWrite(left_motor1,LOW);
digitalWrite(right_motor1,LOW);
digitalWrite(right_motor2,LOW);
return "Success:Left";
}
String left(String *data) {
command = "LEFT";
digitalWrite(left_motor1,HIGH);
digitalWrite(left_motor2,LOW);
digitalWrite(right_motor1,HIGH);
digitalWrite(right_motor2,LOW);
delay(delay_time);
digitalWrite(left_motor2,LOW);
digitalWrite(left_motor1,LOW);
digitalWrite(right_motor1,LOW);
digitalWrite(right_motor2,LOW);
return "Success:Right";
}
String stopcar(String *data) {
digitalWrite(left_motor2,LOW);
digitalWrite(left_motor1,LOW);
digitalWrite(right_motor1,LOW);
digitalWrite(right_motor2,LOW);
return "Success:Stop";
}
void setup() {
// put your setup code here, to run once:
pinMode(left_motor1,OUTPUT);
pinMode(left_motor2,OUTPUT);
pinMode(right_motor1,OUTPUT);
pinMode(right_motor2,OUTPUT);
pinMode(sensor,INPUT);
boltiot.begin(Serial);
Serial.begin(9600);
boltiot.setCommandString("FORWARD",forward);
boltiot.setCommandString("BACKWARD",backward);
boltiot.setCommandString("LEFT",left);
boltiot.setCommandString("RIGHT",right);
boltiot.setCommandString("STOP",stopcar);
}
void loop() {
// put your main code here, to run repeatedly:
boltiot.handleCommand();
check();
}
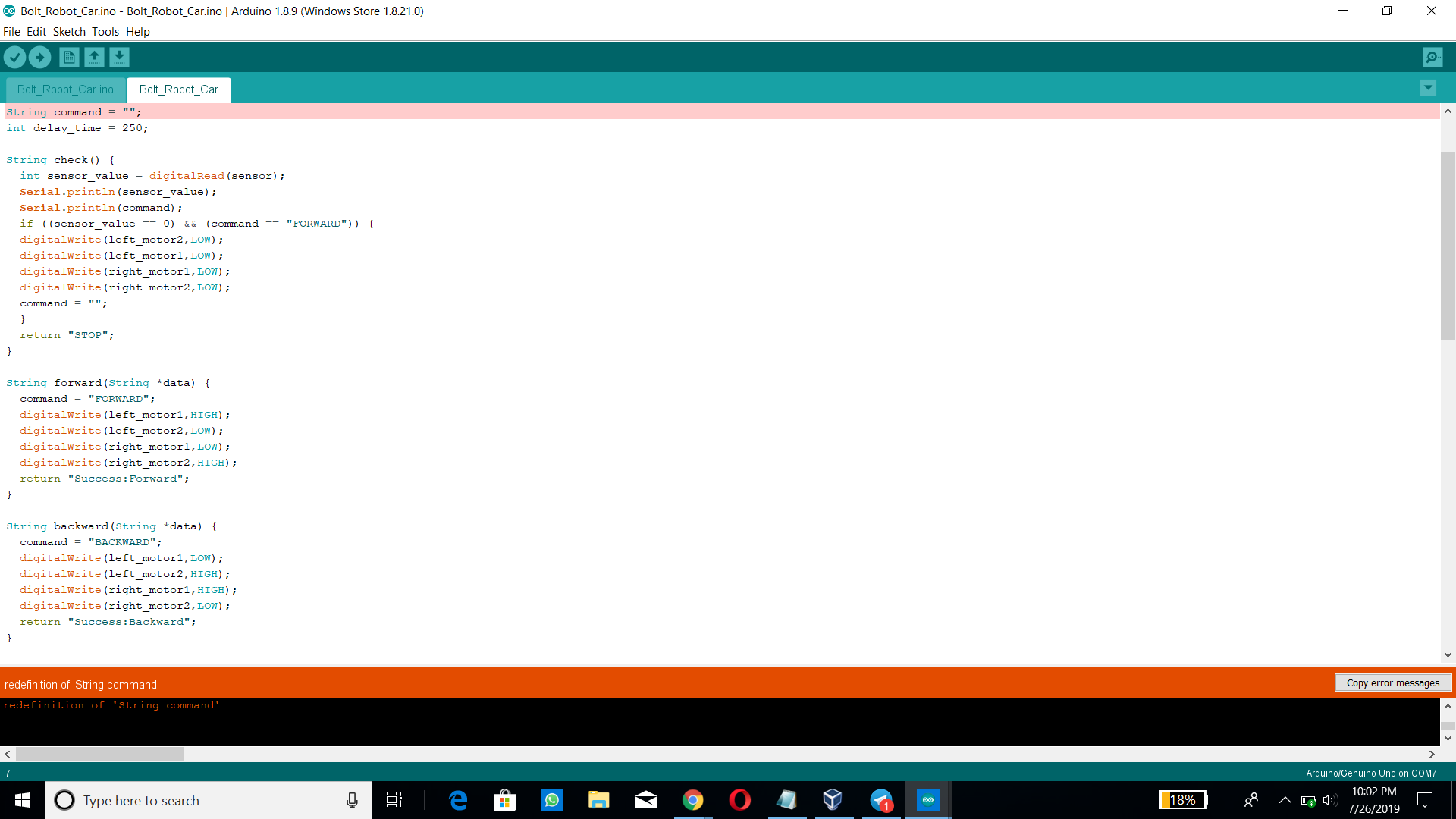
Hi,
You have two files open in the Arduino IDE. One of them is the file named “Bolt_Robot_Car” and the other one is the file named “Bolt_Robot_Car.ino”.
I believe you have the same code written in both these files. You need to delete the full code from 1 of these files to allow the code to be compiled.